Челябинец рассчитал движение хирургического робота на шести ногах. Скрин

Ученый Южно-Уральского госуниверситета (ЮУрГУ) в Челябинске Евгений Мартюшев рассчитал движение шестиногого хирургического робота. Как URA.RU рассказали в пресс-службе вуза, установка может применяться не только в медицине, но и других отраслях.
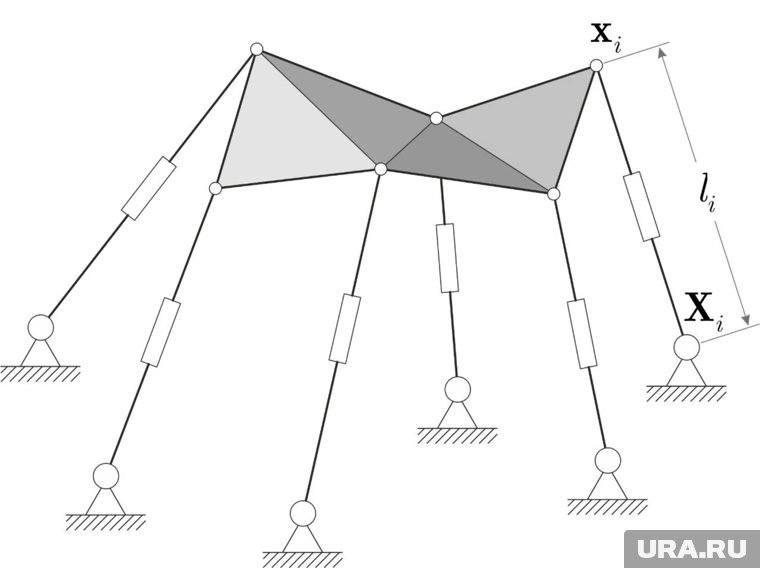
«Доцент Института естественных и математических наук ЮУрГУ Евгений Мартюшев создал уникальный алгоритм для кинематического расчета платформы Стюарта. Плоская платформа стоит на шести «ногах», прикрепленных шарнирами к полу», — пояснили URA.RU в ЮУрГУ.
Платформа имеет возможность перемещаться в различных направлениях и наклоняться. Ее применение — от компьютерной игровой графики до авиасимуляторов, роботов-манипуляторов, тактильных устройств, хирургических роботов, радиотелескопов. Агрегат может свободно двигаться в любом направлении: вверх-вниз, вперед-назад, влево-вправо, а также наклоняться и поворачиваться (тангаж, крен, рыскание).
Алгоритм, разработанный Мартюшевым, реализован на языках программирования MATLAB, Julia и Python. Расчет доступен на платформе GitHub. Работа позволит инженерам и программистам по всему миру использовать его в своих проектах. Исследование подтвердило корректность работы алгоритма экспериментальными данными. Результаты опубликовал международный журнал «Теория машин и механизмов». Разработку Мартюшев выполнил в рамках программы в сфере искусственного интеллекта при поддержке Аналитического центра при правительстве РФ.
Сохрани номер URA.RU - сообщи новость первым!
Что случилось в Челябинске и Магнитогорске? Переходите и подписывайтесь на telegram-каналы «Челябинск, который смог» и «Стальной Магнитогорск», чтобы узнавать все новости первыми!